
You are seeing a free-to-access but limited selection of the activity Altmetric has collected about this research output.
Click here to find out more.
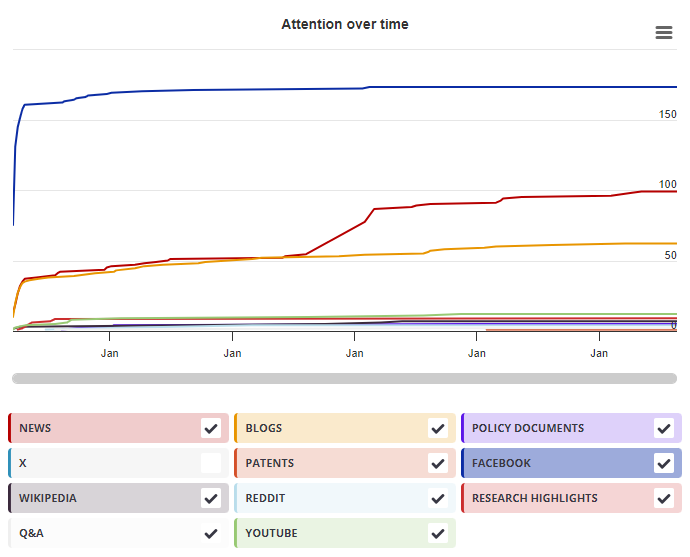
Timeline
| Chapter title |
Developing a Flexible Segment Unit for Redundant-DOF Manipulator Using Bending Type Pneumatic Artificial Muscle
|
|---|---|
| Chapter number | 33 |
| Book title |
ROMANSY 23 - Robot Design, Dynamics and Control
|
| Published by |
Springer, Cham, September 2020
|
| DOI | 10.1007/978-3-030-58380-4_33 |
| Book ISBNs |
978-3-03-058379-8, 978-3-03-058380-4
|
| Authors |
Hiroki Tomori, Tomohiro Koyama, Hiromitsu Nishikata, Akinori Hayasaka, Ikumi Suzuki |